[学习笔记] Linux 多线程开发
Linux 多线程开发
线程概述
与进程 (process) 类似,线程(thread)是允许应用程序并发执行多个任务的一种机制。一个进程可以包含多个线程。 同一个程序中的所有线程均会独立执行相同的程序,且共享同一份全局内存区域,其中包括初始化数据段、未初始化数据段、以及堆内存段。 (传统意义上的 UNIX 进程只是多线程程序的一个特例,该进程只包含一个线程)
- 进程是CPU分配资源的最小单位,线程是操作系统调度执行的最小单位。
- 线程是轻量级的进程 (LWP: Light Weight Process),在 Linux 环境下线程的本质仍是进程。
- 查看指定进程的 LWP 号: ps -Lf pid
线程和进程区别
进程间的 信息难以共享。由于除去只读代码段外,父子进程并未共享内存,因此必须采用一些进程间通信方式,在进程间进行信息交换。
调用 fork() 来创建进程的代价相对较高,即便利用写时复制技术,仍需要复制诸如内存页表和文件描述符之类的多种进程属性,这意味着 fork() 调用在时间上的开销任然不菲。
线程之间能够方便、快速的共享信息。只需将数据复制到共享(全局或堆)变量中即可。
创建线程比创建进程通常快 10 倍甚至更多。线程是共享虚拟地址空间的,无需采用写时复制来复制内存,也无需复制页表。
线程之间共享和非共享资源
- 共享资源
- 进程 ID 和 父进程 ID
- 进程组 ID 和 会话 ID
- 用户 ID 和 用户组 ID
- 文件描述符表
- 信号处置
- 文件系统相关信息: 文件权限掩码(umask)、当前工作目录
- 虚拟地址空间(除 栈、 .text)
- 非共享资源
- 线程 ID
- 信号掩码
- 线程特有的数据
- error 变量
- 实时调度策略和优先级
- 栈,本地变量和函数的调用链接信息
NPTL
NPTL, Native POSIX Thread Library,是 Linux 线程的一个新实现,它克服了 LinuxThreads 的缺点,同时也符合 POSIX 的需求。
- 查看当前 pthread 库版本, getconf GNU_LIBPTHREAD_VERSION
创建线程
一般情况下, main 函数所在的线程我们称之为主线程(main 线程),其余创建的线程称之为子线程。
- 程序中默认只有一个进程,fork() 函数调用,2个进程。
- 程序中默认只有一个线程,pthread_create() 函数调用,2个线程。
/**
NAME
pthread_create - create a new thread
SYNOPSIS
#include <pthread.h>
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
Compile and link with -pthread.
- 功能: 创建一个子进程
- 参数: thread: 传出参数,线程创建成功后,子线程的线程ID被写到该变量中。
- attr: 设置线程的属性,一般使用默认值 NULL。
- start_routine: 函数指针,这个函数是子线程需要处理的逻辑代码
- arg: 给第三个参数使用, 传参
- 返回值:
- 成功 0
- 失败:返回错误号,这个错误号和之前的 errno 不太一样。
获取错误号的信息, char* strerror(int errnum);
*/
#include <pthread.h>
#include<stdio.h>
#include <string.h>
//#include <stdlib.h>
//#include <time.h>
#include <unistd.h>
void *callback(void *arg) {
printf("child thread...\n");
printf("arg value : %d\n", *(int *) arg);
return NULL;
}
int main() {
pthread_t tid;
int num = 10;
// 创建一个子线程
int ret = pthread_create(&tid, NULL, callback, (void *) &num);
if (ret != 0) {
char *err_str = strerror(ret);
printf("errno: %s\n", err_str);
}
for (int i = 0; i < 5; i++)
printf("%d\n", i);
sleep(1);
return 0;
}
线程终止
- pthread_exit()
//
// Created by larry on 23-4-2.
//
/**
NAME
pthread_exit - terminate calling thread
SYNOPSIS
#include <pthread.h>
void pthread_exit(void *retval);
- 功能: 终止一个线程,在那个线程中调用,就表示终止那个线程。
- 参数: retval: 需要传递一个指针,作为一个返回值,可以在 pthread_join() 中获取到。
NAME
pthread_self - obtain ID of the calling thread
SYNOPSIS
#include <pthread.h>
pthread_t pthread_self(void);
Compile and link with -pthread.
NAME
pthread_equal - compare thread IDs
SYNOPSIS
#include <pthread.h>
int pthread_equal(pthread_t t1, pthread_t t2);
- 功能: 比较两个线程ID是否相等
不同的操作系统, pthread_t 类型的实现不一样,有的是无符号的长整型,有的是使用结构体去实现。
Compile and link with -pthread.
*/
#include <pthread.h>
#include <stdio.h>
#include <string.h>
void *callback(void *arg) {
printf("child thread id: %ld\n", pthread_self());
return NULL; // pthread_exit(NULL);
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if (ret != 0) {
char *err_str = strerror(ret);
printf("errno: %s\n", err_str);
}
// main thread
for (int i = 0; i < 20; i++)
printf("%d\n", i);
printf("tid:%ld, main thread id :%ld\n", tid, pthread_self());
// 让主线程退出,当主线程退出时,不会影响其他正常运行的线程。
pthread_exit(NULL);
printf("main thread exit.\n");
return 0;
}
线程操作
- pthread_join()
//
// Created by larry on 23-4-2.
//
/**
NAME
pthread_join - join with a terminated thread
SYNOPSIS
#include <pthread.h>
int pthread_join(pthread_t thread, void **retval);
- 功能: 和一个已经终止的线程进行连接。
回收子线程的资源,
这个函数是一个阻塞函数,调用一次只能回收一个子线程。
一般在主线程中使用。
- 参数: thread 要回收的子线程的ID
- retval: 接收子线程退出时的返回值。
- 返回值:成功 0, 失败: errno.
Compile and link with -pthread.
*/
#include <string.h>
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
int value = 10; // 局部变量
void *callback(void *arg) {
printf("child thread: tid: %ld\n", pthread_self());
// sleep(3);
// return NULL;
// int value = 10; // 局部变量
pthread_exit((void *) &value); // return (void*) &value;
}
int main() {
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if (ret != 0) {
char *err_str = strerror(ret);
printf("err_str: %s\n", err_str);
}
// main thread
for (int i = 0; i < 5; i++)
printf("%d\n", i);
printf("tid: %ld, main thread tid: %ld\n", tid, pthread_self());
int *thread_return_value;
ret = pthread_join(tid, (void *) &thread_return_value);
if (ret != 0) {
char *err_str = strerror(ret);
printf("join err_str:%s\n", err_str);
}
printf("exit code:%d\n", *thread_return_value);
printf("回收子线程资源成功!\n");
pthread_exit(NULL);
return 0;
}
线程的分离
- pthread_detach()
//
// Created by larry on 23-4-2.
//
/**
NAME
pthread_detach - detach a thread
SYNOPSIS
#include <pthread.h>
int pthread_detach(pthread_t thread);
- 功能: 分离一个线程。被分离的线程在终止的时候,会自动释放资源给系统。
1、不能多次分离,会产生不可预料的行为。
2、不能去连接一个已经分离的线程,会报错。
- 参数:需要分离的线程的ID
- 返回值: 成功 1, 失败 返回错误号
Compile and link with -pthread.
*/
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
#include <string.h>
void *callback(void *arg) {
printf("child pthread:%ld\n", pthread_self());
return NULL;
}
int main() {
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if (ret != 0) {
char *err_str = strerror(ret);
printf("err_str %s\n", err_str);
}
printf("tid: %ld, main thread tid: %ld\n", tid, pthread_self());
// 设置子线程分离
pthread_detach(tid);
// 设置分离以后,对分离的线程进行连接
ret = pthread_join(tid, NULL);
if (ret != 0) {
char *err_str = strerror(ret);
printf("detach and then join, with:%s\n", err_str);
}
for (int i = 0; i < 5; i++)
printf("%d\n", i);
pthread_exit(NULL);
return 0;
}
线程的取消
- pthread_cancel()
//
// Created by larry on 23-4-2.
//
/**
NAME
pthread_cancel - send a cancellation request to a thread
SYNOPSIS
#include <pthread.h>
int pthread_cancel(pthread_t thread);
- 功能: 取消线程(让线程终止)
取消某个线程,可以终止某个线程的运行
但是并不是立马终止,而是当子线程执行到一个取消点,线程才会终止。
取消点:系统规定号的一些系统调用,我们可以粗略理解为从用户区到内核区的切换,这个位置称之为取消点。
Compile and link with -pthread.
*/
#include <stdio.h>
#include <string.h>
#include <pthread.h>
void *callback(void *arg) {
printf("in child thread: tid: %ld\n", pthread_self());
for (int i = 0; i < 50; i++)
printf("child %d\n", i);
return NULL;
}
int main() {
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if (ret != 0) {
char *err_str = strerror(ret);
printf("err_str: %s\n", err_str);
}
// 取消线程
pthread_cancel(tid);
for (int i = 0; i < 5; i++)
printf("%d\n", i);
printf("pid: %ld, main thread id: %ld\n", tid, pthread_self());
pthread_exit(NULL);
return 0;
}
线程属性
//
// Created by larry on 23-4-2.
//
/**
NAME
pthread_attr_init, pthread_attr_destroy - initialize and destroy thread attributes object
SYNOPSIS
#include <pthread.h>
int pthread_attr_init(pthread_attr_t *attr);
- 功能: 初始化线程属性变量
int pthread_attr_destroy(pthread_attr_t *attr);
- 释放线程属性资源
Compile and link with -pthread.
NAME
pthread_attr_setdetachstate, pthread_attr_getdetachstate - set/get detach state attribute in thread attributes object
SYNOPSIS
#include <pthread.h>
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate);
- 设置线程分离的状态属性
int pthread_attr_getdetachstate(const pthread_attr_t *attr, int *detachstate);
- 获取线程分离的状态属性
Compile and link with -pthread.
*/
#include <stdio.h>
#include <pthread.h>
#include <string.h>
void *callback(void *arg) {
printf("in child thread: %ld", pthread_self());
return NULL;
}
int main() {
pthread_attr_t attr; // 创建一个线程属性变量
pthread_attr_init(&attr); // 初始化线程属性变量
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED); // 设置属性
pthread_t tid;
int ret = pthread_create(&tid, &attr, callback, NULL);
if (ret != 0) {
char *str_err = strerror(ret);
printf("str_err: %s", str_err);
}
size_t sz;
pthread_attr_getstacksize(&attr, &sz); // 获取线程栈的大小
printf("get stack size: %ld\n", sz); // 8388608
printf("tid: %ld, main thread id:%ld", tid, pthread_self());
pthread_attr_destroy(&attr); // 释放线程属性资源
pthread_exit(NULL);
return 0;
}
线程同步
//
// Created by larry on 23-4-2.
//
/**
使用多线程实现买票案例
有三个窗口,一共是100张票。
*/
#include <pthread.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
int tickets = 100; // 全局变量,所有线程共享
void *sell_tickets(void *arg) {
// 卖票
// int tickets = 100; // 局部变量
while (tickets > 0) {
usleep(6000);
printf("%ld, 正在卖第 %d 张票\n", pthread_self(), tickets);
tickets--;
}
return NULL;
}
int main() {
// 创建3个子线程
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sell_tickets, NULL);
pthread_create(&tid2, NULL, sell_tickets, NULL);
pthread_create(&tid3, NULL, sell_tickets, NULL);
// 回收子线程的资源, 阻塞
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
// 设置线程分离
// pthread_detach(tid1);
// pthread_detach(tid2);
// pthread_detach(tid3);
pthread_exit(NULL);
return 0;
}
线程的主要优势在于,能够通过全局变量来共享信息。不过,这种便捷的共享是有代价的:
- 必须保证多个线程不会同时修改同一变量,或者某一线程不会读取正在由其他线程修改的变量。
临界区是指访问某一共享资源的代码片段,并且这段代码的执行应为原子操作,也就是同时访问同一共享资源的其他线程不应中断该片段的执行。
线程同步:即当有一个线程正在对内存进行操作时,其他线程都不可以对这个内存地址进行操作,
直到该线程完成操作,其他线程才能对该内存地址进行操作,而其他线程则处于等待状态。
互斥锁
- 互斥量
为了避免线程更新共享变量时出现问题,可以使用互斥量 mutex( mutual exclusion ) 的缩写来确保同时仅有一个线程可以访问某项共享资源。
可以使用互斥量来保证对任意共享资源的原子访问。
互斥量有两种状态,(已锁定 locked) , 和 (未锁定 unlocked)。任何时候,至多只有一个线程可以锁定该互斥量。
试图对已经锁定的某一互斥量再次加锁, 将可能阻塞线程或者报错失败,具体取决于加锁时使用的方法。
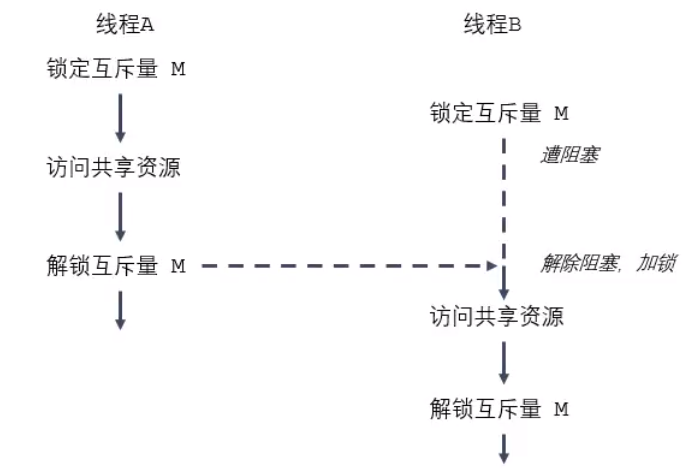
一旦线程锁定互斥量,随机成为该互斥量的所有者,只有所有者才能给互斥量解锁。 一般情况下,对每一共享资源(可能有多个相关变量组成)会使用不同的互斥量, 每一线程在访问统一资源时将采用如下协议: 针对共享资源锁定互斥量,访问共享资源,对互斥量解锁。
如果多个线程试图执行这一块代码(一个临界区),事实上只有一个线程能够持有该互斥量(其他线程将遭到阻塞),即同时只有一个线程能够进入这段代码区域。
- 互斥量的类型 pthread_mutex_t
//
// Created by larry on 23-4-3.
//
#include <stdio.h>
#include <string.h>
#include <pthread.h>
#include <unistd.h>
int tickets = 1000;
pthread_mutex_t mutex; // 创建一个互斥量
void *sell_tickets(void *arg) {
// sale
while (1) {
pthread_mutex_lock(&mutex); // 加锁
if (tickets > 0) {
usleep(600);
printf("child thread: %ld are selling %d ticket\n", pthread_self(), tickets);
--tickets;
} else {
pthread_mutex_unlock(&mutex); // 解锁
break;
}
pthread_mutex_unlock(&mutex); // 解锁
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL); // 初始化互斥量
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sell_tickets, NULL);
pthread_create(&tid2, NULL, sell_tickets, NULL);
pthread_create(&tid3, NULL, sell_tickets, NULL);
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
pthread_mutex_destroy(&mutex); // 释放互斥量资源
pthread_exit(NULL);
return 0;
}
死锁
有时,一个线程需要同时访问两个或更多不同的共享资源,而每个资源又都由不同的互斥量管理。当超过一个线程加锁同一组互斥量时,就有可能发生死锁。
两个或两个以上的进程在执行过程中,因争夺资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁。
死锁的几种场景:
- 忘记释放锁
- 重复加锁
- 多线程多锁,抢占锁资源
//
// Created by larry on 23-4-3.
//
/**
构成死锁的情况
1. 忘记解锁
2. 重复加锁
3.
*/
#include <stdio.h>
#include <pthread.h>
int tickets = 100;
pthread_mutex_t mutex;
void *sale_tickets(void *arg) {
while (1) {
// add lock
pthread_mutex_lock(&mutex);
pthread_mutex_lock(&mutex);
if (tickets > 0) {
printf("child thread %ld, selling %d ticket\n", pthread_self(), tickets);
--tickets;
} else {
pthread_mutex_unlock(&mutex);
break;
}
pthread_mutex_unlock(&mutex);
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sale_tickets, NULL);
pthread_create(&tid2, NULL, sale_tickets, NULL);
pthread_create(&tid3, NULL, sale_tickets, NULL);
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}
//
// Created by larry on 23-4-3.
//
// 死锁的情况 3
#include <pthread.h>
#include <stdio.h>
#include<unistd.h>
// 创建两个互斥量
pthread_mutex_t mutex1, mutex2;
void *workA(void *arg) {
pthread_mutex_lock(&mutex1);
usleep(1);
pthread_mutex_lock(&mutex2);
printf("workA.... \n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
void *workB(void *arg) {
pthread_mutex_lock(&mutex2);
pthread_mutex_lock(&mutex1);
printf("workB.... \n");
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex2);
return NULL;
}
int main() {
pthread_mutex_init(&mutex1, NULL);
pthread_mutex_init(&mutex2, NULL);
pthread_t tid1, tid2;
pthread_create(&tid1, NULL, workA, NULL);
pthread_create(&tid2, NULL, workB, NULL);
pthread_join(tid1, NULL); // 回收子线程资源
pthread_join(tid2, NULL);
pthread_mutex_destroy(&mutex1);
pthread_mutex_destroy(&mutex2);
pthread_exit(NULL);
return 0;
}
读写锁
当一个线程已经持有互斥锁时,互斥锁将所有试图进入临界区的线程都阻塞住。但是考虑一种情形,当前持有互斥锁的线程只是要读访问共享资源, 而同时 有其他几个线程也想读取这个共享资源,但是由于互斥锁的排它性,所有其他线程都无法获取锁,也就无法读访问共享资源了, 但是实际上多个线程同时读 访问共享资源并不会导致问题。
在对数据的读写操作中,更多的是读操作,写操作比较少,例如对数据库的读写应用。为了满足当前能够允许多个读出,但只允许一个写入的需求,线程提供了读写锁来实现。
读写锁的特点:
- 如果有其它线程读数据,则允许其它线程执行读操作,但不允许写操作。
- 如果有其它线程写数据,则其它线程都不允许读写操作。
- 写是独占的,写的优先级高。
//
// Created by larry on 23-4-3.
//
/**
pthread_rwlock_t
pthread_rwlock_init
pthread_rwlock_destroy
pthread_rwlock_rdlock
pthread_rwlock_tryrdlock
pthread_rwlock_wrlock
pthread_rwlock_trywrlock
pthread_rwlock_unlock
案例:创建8个线程操作同一个全局变量
3个线程不定时写这个全局变量
其它线程不定时读这个全局变量
*/
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
int num = 1;
pthread_rwlock_t rwlock; // 读时可多个并发读
//pthread_mutex_t mutex; // 多个线程读是需要阻塞
void *writeNum(void *arg) {
while (1) {
// pthread_mutex_lock(&mutex);
pthread_rwlock_wrlock(&rwlock);
num++;
printf("++write, tid: %ld, num = %d\n", pthread_self(), num);
pthread_rwlock_unlock(&rwlock);
// pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
void *readNum(void *arg) {
while (1) {
// pthread_mutex_lock(&mutex);
pthread_rwlock_rdlock(&rwlock);
printf("===read, tid: %ld, num = %d\n", pthread_self(), num);
pthread_rwlock_unlock(&rwlock);
// pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
int main() {
pthread_rwlock_init(&rwlock, NULL);
// pthread_mutex_init(&mutex, NULL);
pthread_t w_t_ids[3], r_t_ids[5];
for (int i = 0; i < 3; i++)
pthread_create(&w_t_ids[i], NULL, writeNum, NULL);
for (int i = 0; i < 5; i++)
pthread_create(&r_t_ids[i], NULL, readNum, NULL);
for (int i = 0; i < 3; i++)
pthread_detach(w_t_ids[i]);
for (int i = 0; i < 5; i++)
pthread_detach(r_t_ids[i]);
pthread_rwlock_destroy(&rwlock);
// pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}
生产者和消费者模型
生产者消费模型中的对象:
- 生产者
- 消费者
- 容器
//
// Created by larry on 23-4-3.
//
// 生产者消费者模型的简化版
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <malloc.h>
#include <stdlib.h>
struct Node {
int num;
struct Node *next;
};
// head node
struct Node *head = NULL;
void *producer(void *arg) {
// 不断创建新的节点添加到链表中
while (1) {
struct Node *newNode = (struct Node *) malloc(sizeof(struct Node));
// 头插法
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num: %d, tid: %ld\n", newNode->num, pthread_self());
usleep(100);
}
return NULL;
}
void *customer(void *arg) {
while (1) {
struct Node *tmp = head;
head = head->next;
printf("delete node num: %d, tid: %ld\n", tmp->num, pthread_self());
free(tmp);
usleep(100);
}
return NULL;
}
int main() {
// 创建5个生产者和5个消费者模型
pthread_t producer_tid_s[5], customer_tid_s[5];
for (int i = 0; i < 5; i++) {
pthread_create(&producer_tid_s[i], NULL, producer, NULL);
pthread_create(&customer_tid_s[i], NULL, customer, NULL);
}
for (int i = 0; i < 5; i++) {
pthread_detach(producer_tid_s[i]);
pthread_detach(customer_tid_s[i]);
}
while (1) {
sleep(10);
}
pthread_exit(NULL);
return 0;
}
条件变量
//
// Created by larry on 23-4-3.
//
/**
条件变量的类型 pthread_cond_t, 它不是锁
pthread_cond_init
pthread_cond_destroy
pthread_cond_wait
- 等待,调用了该函数,线程会阻塞
pthread_cond_timedwait
- 等待了多长时间,调用了这个函数,线程会阻塞,知道指定的时间结束
pthread_cond_signal
- 唤醒一个或多个等待的线程
pthread_cond_broadcast
- 唤醒所有等待的线程
*/
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <malloc.h>
#include <stdlib.h>
// 创建一个互斥量
pthread_mutex_t mutex;
//
pthread_cond_t cond;
struct Node {
int num;
struct Node *next;
};
// head node
struct Node *head = NULL;
void *producer(void *arg) {
// 不断创建新的节点添加到链表中
while (1) {
pthread_mutex_lock(&mutex);
struct Node *newNode = (struct Node *) malloc(sizeof(struct Node));
// 头插法
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num: %d, tid: %ld\n", newNode->num, pthread_self());
// 只要生产了一个就通知消费者消费
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
void *customer(void *arg) {
while (1) {
pthread_mutex_lock(&mutex);
if (head != NULL) {
// has data
struct Node *tmp = head;
head = head->next;
printf("delete node num: %d, tid: %ld\n", tmp->num, pthread_self());
free(tmp);
pthread_mutex_unlock(&mutex);
usleep(100);
} else {
// no data, need to wait.
// 当着函数调用阻塞的时候,会对互斥锁进行解锁,当不阻塞的时候,会重新对互斥加锁。
pthread_cond_wait(&cond, &mutex);
pthread_mutex_unlock(&mutex);
}
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
pthread_cond_init(&cond, NULL);
// 创建5个生产者和5个消费者模型
pthread_t producer_tid_s[5], customer_tid_s[5];
for (int i = 0; i < 5; i++) {
pthread_create(&producer_tid_s[i], NULL, producer, NULL);
pthread_create(&customer_tid_s[i], NULL, customer, NULL);
}
for (int i = 0; i < 5; i++) {
pthread_detach(producer_tid_s[i]);
pthread_detach(customer_tid_s[i]);
}
while (1) {
sleep(10);
}
pthread_cond_destroy(&cond);
pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}
信号量
//
// Created by larry on 23-4-3.
//
/**
信号量的类型 sem_t
NAME
sem_init - initialize an unnamed semaphore
SYNOPSIS
#include <semaphore.h>
int sem_init(sem_t *sem, int pshared, unsigned int value);
- 参数: sem 信号变量的地址
- pshared: 0 用在线程之间,非0用在进程之间
- value: 信号量中的值
sem_destroy
- 释放资源
NAME
sem_wait, sem_timedwait, sem_trywait - lock a semaphore
SYNOPSIS
#include <semaphore.h>
int sem_wait(sem_t *sem);
- 对信号量的值减1,如果值为0,就阻塞
int sem_trywait(sem_t *sem);
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
Link with -pthread.
sem_post
- 对信号量解锁,调用一次信号量的值加1.
sem_getvalue
sem_t psem;
sem_t csem;
init(psem,0, 8)
init(csem,0, 0)
producer(){
sem_wait(&psem);
sem_post(&csem);
}
customer(){
sem_wait(&csem);
sem_post(&psem);
}
*/
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#include <malloc.h>
#include <stdlib.h>
#include <semaphore.h>
// 创建一个互斥量
pthread_mutex_t mutex;
// sem
sem_t psem, csem;
struct Node {
int num;
struct Node *next;
};
// head node
struct Node *head = NULL;
void *producer(void *arg) {
// 不断创建新的节点添加到链表中
while (1) {
sem_wait(&psem);
pthread_mutex_lock(&mutex);
struct Node *newNode = (struct Node *) malloc(sizeof(struct Node));
// 头插法
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num: %d, tid: %ld\n", newNode->num, pthread_self());
pthread_mutex_unlock(&mutex);
sem_post(&csem);
usleep(100);
}
return NULL;
}
void *customer(void *arg) {
while (1) {
sem_wait(&csem);
pthread_mutex_lock(&mutex);
// has data
struct Node *tmp = head;
head = head->next;
printf("delete node num: %d, tid: %ld\n", tmp->num, pthread_self());
free(tmp);
pthread_mutex_unlock(&mutex);
sem_post(&psem);
// usleep(100);
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
sem_init(&psem, 0, 8);
sem_init(&csem, 0, 0);
// 创建5个生产者和5个消费者模型
pthread_t producer_tid_s[5], customer_tid_s[5];
for (int i = 0; i < 5; i++) {
pthread_create(&producer_tid_s[i], NULL, producer, NULL);
pthread_create(&customer_tid_s[i], NULL, customer, NULL);
}
for (int i = 0; i < 5; i++) {
pthread_detach(producer_tid_s[i]);
pthread_detach(customer_tid_s[i]);
}
while (1) {
sleep(10);
}
pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}